11. 02. 2006 18:00 | 00_References_&_Start , 12_Curated_posts
Yesterday (1960ies) / Today (2006)
From industry, planes, cars and motorways to services, mobile media, mobile (micro)-spaces, interactions, jet-lag, ...
From Architecture's "high-tech" & mobility utopias to a "mish-mash" (hybridization) of (technological) objects, micro-architectures, situations, networks and interfaces.
-
Those two comparative images (yesterday/today, see below) serve us since the start of the project as a kind of general background for our transversal ra&d project (transversalities between architecture, design, sciences). They resume some of our main concerns:
-
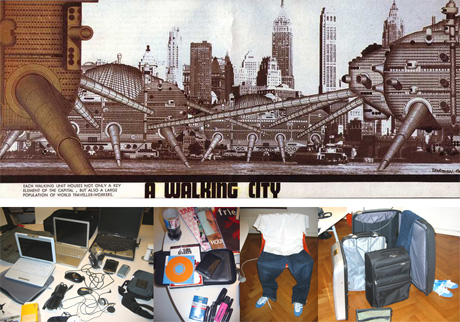
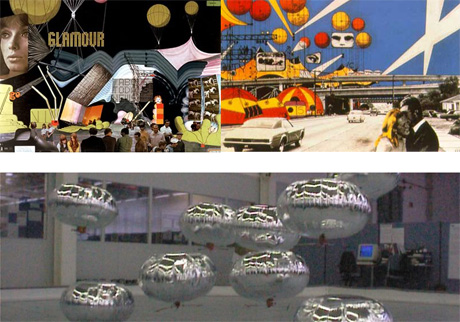
___They both speak about "mobility". Two kind of "mobilities": 1__ mobile environment in term of distance. It moves and its context of use is changing (img 1: a walking city & a "mobile personal environment") or 2__ mobile environment in term of time. Its configuration, shape or function varies along time, but its location is fixed (img 2: an instant city and a flock of blimps).
We can therefore speak about "Variable environments" in these two cases (variable in distance/context and/or in configuration/size over time).
-
___They both compare architectural utopias of the 60ies (Archigram's projects "A walking city" and "Instant city") to their kind of contemporary counterpart. The "mobility" utopia seem to have emerged, changed its scale and looks now as a transversal design problem (who's in charge of the design within those environment?). Everybody can notice that it obviously didn't emerged as it was envisoned and that it was also clearly not planned...
The two images comment about crossovers between disciplines as well (what belonged to a design domain seems to belong to another one today --i.e. space vs micro-spaces or urbanity vs micro-urbanity, spatial interfaces, interactive objects, graphics in space, interactive ornementation, urban screens, etc.--). They call for renewed collaborations between designers and between designers and engineers, so to face contemporary stakes.
The first image below is a composition between a famous collage from Archigram (top: "A walking city"), and actual snapshots of what compose some part of our daily mobile media and objects environment. What contributes at a small space scale to our personal mobility (bottom: "Personal mobile environment, documentation", fabric | ch).
-
The second image is a composition between another Archigram's project (top: "Instant City") and an image of a swarm of intelligent blimps (bottom: "The Flying Flock", IAS LAb, University of West England)
-
Of course, those two images and the "variable environment/" or the "mobility" problematic (see post below) serve us as a general thematic frame for our transversal ra&d project, even if our first ideas were literally to work within those two contexts (personal mobile environment & flying micro-architectural environment or flying architectural agents).
But the research project reveals itself to evolve a bit differently due to several intrinsic reasons, in particular to the interaction between the partners. Through the ongoing process our area of work has therefore mainly evolved into "mobile media" and "mobile (micro-)environments".
The team around the project is a transversal design and "test-tube" group: designers from écal (interaction, objects, products & graphics designers), architects, scientists from EPFL. Professionals (workshops) and/or teachers from other universities will be also invited at different moments during the project. Have a look at the network of partners involved.
Regarding scientific collaborations, we've chosen to collaborate with laboratories that are working at a research level on technologies that could have an impact upon mobility, mobile media or "variable environments" in a close future:
___First scientific collaboration is about "Augmented reality", therefore in connection with the first image ("mobile personal environment", mobile media). See the presentation of our partner (EPFL-STI) HERE.
___Second scientific collaboration is about swarm-intelligent & collective robotics (small mobile robots), therefore in connection with the second image. See the presentation of our partner (EPFL-SWIS) HERE.
Posted by patrick keller at 11. 02. 2006 18:00