« Contribution to opensource: jARToolkit | Main | Results: a temporary conclusion by Ben Hooker »
03. 05. 2006 11:08 | 09_EPFL , 12_Curated_posts
Fusion of marker-based tracking and particle-filter based camera tracking
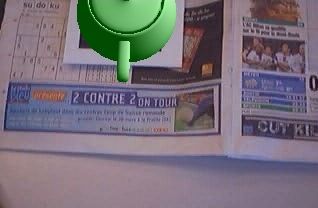
We have developed a novel a video-based tracker that combines a marker-based tracker and a particle filter-based camera tracker. The framework relies on their complementary performance. We propose a fusion where the overall estimate is selected among the individual estimates. More precisely, the marker-based tracker is selected when the reference is available whereas the particle filter-based camera tracker is selected otherwise.
Some snapshots of the performance of the fusion tracker in front of:
Occlusions

Marker partially out of the field of view
Video input with little illumination
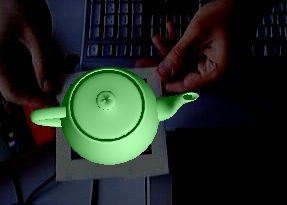
Video input with saturated illumination

David Marimon
Signal Processing Institute
Posted by david.marimon at 3. 05. 2006 11:08