« E-Puck technology | Main | EPFL - SWIS - Swarm-Intelligent Systems Group »
03. 03. 2007 14:25 | 04_Workshop_4 , 12_Curated_posts
Rolling microfunctions / A scenario
ROLLING MICRO-FUNCTIONS (for SOHOs)
Variable environment's Workshop by fabric | ch and SWIS-EPFL.
Design brief & AD by fabric | ch
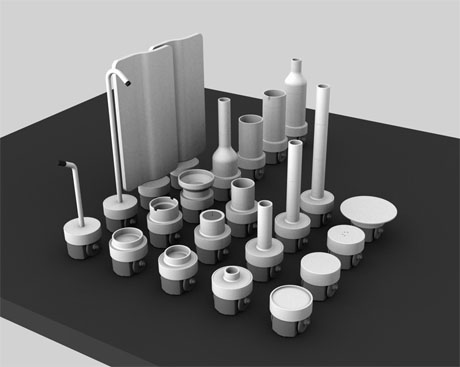
Object design by Laurent Soldini & Julien Ayer
-
What would happen if you were living, inviting your friend(s) and working into one single room? In a space that would therefore nearly naturally evolve between very private functions and public ones, where the shape of space wouldn’t change but where functions slowly migrate from one into another without the “user(s)” really even noticing it (the status of space would be movement).
“Rolling micro-functions” is an attempt to illustrate and develop working propositions around this prospective theme at a micro-space scale (a long table): our scenario for the workshop is one room equipped with a long table and several chairs (it could ideally be something looking like the Bouroullec’s Joyn table from Vitra or even a hybrid bed-table –see link 1 or link 2–, had it been further developed) where those evolving functions would occur (working, eating, relaxing and even sleeping).
In this room, a tracking system that give information about user(s) activities/configurations will be necessary as well as a set of robotic micro-functions that can reconfigure themselves according to those captured user(s)’ information, so as maybe other information or invisible layers as well (networked information, digital world, stock quotes, dynamic data, electromagnetic fields, live data from air and biological tracking or from weather stations, news, etc.)
While today most of our architectural spaces are structured aggregation of mono-functional separate rooms, usually partitioned (a room for sleeping, a room for cooking, a room for watching TV or eating, a room for bathing, etc.), which is a functional approach inherited from the modern period (that consumes a lot of space and that btw also contributes to energy consumption problems), this project tries to suggest a different and speculative approach with the densification (urban room?), multiplication and variation of functions within one space and therefore its evolutionary and continuous nature over time (from private to public and return, etc.).
-
Note1: this workshop took place during several months between July and November 2006. As it implied software developments as well as design proposals, it was necessary to take more time than for some of the other workshops (we wanted with this project to reach “working demo” level as well as “fiction demo”), even if it was not full-time work.
As one part of the necessary technology pre-exists to the workshop (E-Puck robots for education) and has some clear constraints (size, shape and topology, movement, computing capacities, type of sensors, etc.), the attitude here is rather to illustrate certain principles at small scale about our understanding of contemporary space (continuous, layered, variable rather than binary, partitioned and fixed) and to propose speculative artifacts for it. We also limited the information sent to the robots to local, user and camera based tracking.
We’ll therefore work with micro-spaces and micro-functions here that are not so convincing as a potential future product (who would pay 600$ for a rolling ashtray?). But this was not really the purpose in this context, we wanted rather to experiment around (micro-)architectural agent/behaviors and the results could/should be extrapolated to bigger scales.
-
Note2: the project implies the development of a software (“tracking of spatial configuration”) to pass the information about spatial usage to the “E-Puck” robots. The development of this architectural software (webcam based) has been undertaken by fabric | ch.
The robots are also tracked by another camera and its software that is under development at the EPFL.
Finally, a set of rules (behaviors) for the positioning of the robots according to user(s) configurations is also necessary. It acts as a kind of grouping language for the robots. The overall system resembles therefore something in between a kind of “dot-matrix printer for micro-functions” and an "autonomous system" (swarm-intelligent). The idea is not that the robots “brings you an ashtray when you need one”, which would be uninteresting, but rather that they illustrate through functional propositions and configurations their understanding of what is going on in the room.
-
{kind=link}
Posted by patrick keller at 3. 03. 2007 14:25