« Will we "learn" again from Las Vegas (in Google Earth)? | Main | Re-blog of Rolling microfunctions »
14. 03. 2007 14:03 | 09_EPFL
User-driven distributed control of collective assembly using mobile, networked miniature robots
Following the "Rolling microfunctions" workshop between ECAL, fabric | ch and SWIS-EPFL laboratory about swarm networked robotics, Dr Julien Nembrini (in charge of the project for Swiss Federal Institute of Technology) made the following post on SWIS laboratory research webpages:
------------------------

-
"User-driven distributed control of collective assembly using mobile, networked miniature robots
If swarm systems are to be used in human environments, a protocol for human-swarm interaction has to be defined to enable direct and intuitive control by users. Up to now research has concentrated on the difficult problem of controlling the swarm, whereas the interaction problem has been largely overlooked.
-
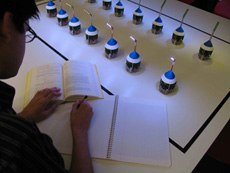
In collaboration with interaction design researchers, the project developed a demonstrator consisting in a fleet of mobile "lighting" robots moving on a large table, such that the swarm of robots form a "distributed table light". In the presence of human users, the group of robots quickly aggregates to form together a lamp whose shape and function depends on the users' positions and behaviors.
-
The whole set-up consists in a collection of small robots moving and interacting on a table, a camera position tracker and a human-computer interface. The swarm-user interaction is designed as follows: the target configuration of the aggregate is controlled through crude position and attitude tracking of users around the table. User tracking and robot tracking are integrated in software and configuration information as well as positioning information are then sent to the robots.
-
Considering the specific task of ordered aggregation as benchmark, the project studies a simple algorithm able to control the geometry of an aggregate consisting of embedded, real-time, self-locomoted robotic units endowed with limited computational and communication capabilities. The robots only use infrared proximity sensors and wireless communication.
-
In this case, the aggregation problem being human centered, time-to-completion becomes critical. The user cannot accept to wait too long for the robots to aggregate. The system has to react quickly to changes in users attitude. This is the reason for defining a hybrid algorithm where global positionnal information is sent to the robots, which then accordingly choose their actions in an autonomous manner.
The project results from a collaboration with designers from Ecole Cantonale d'Art de Lausanne"
Posted by patrick keller at 14. 03. 2007 14:03