« Workshop#4 result: VTSC (Visual Tracking of Spatial Configuration) | Main | Sketches 1 »
03. 03. 2007 14:10 | 04_Workshop_4
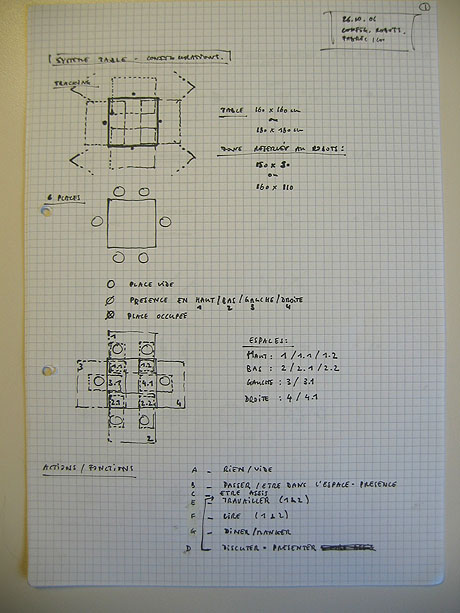
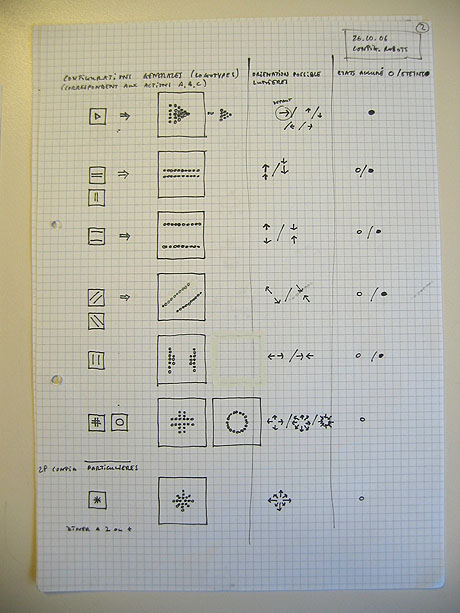
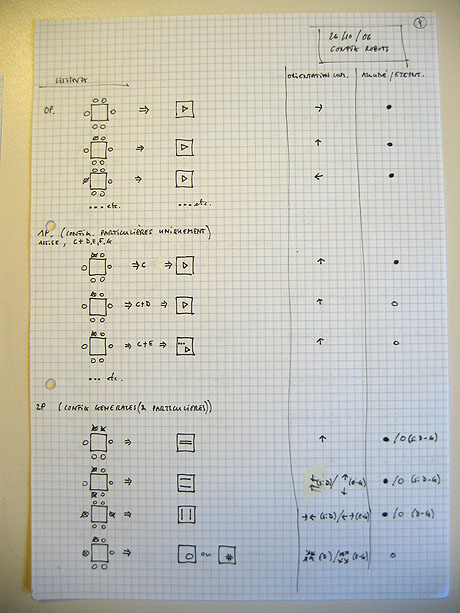
Behaviors, rules and grid based basic patterns
We finally used a 160cm x 160cm table for our tests. Much smaller than what we initially wanted... but this was both due to the size of the room we had for tests and as well as for development comfort.
We produced a webcamera tracking configuration for this particular table (8 camera, 2 mini macs for the users tracking) and a set of organisational rules for the robots. Robots did not have to reach those specific configurations if such or such users' configuration was activated, but rather tend to its achievement.
-
-
-



Posted by patrick keller at 3. 03. 2007 14:10