« Workshop#4 result: Robots behaviors with lighting function | Main | Behaviors, rules and grid based basic patterns »
03. 03. 2007 14:07 | 04_Workshop_4 , 12_Curated_posts
Workshop#4 result: VTSC (Visual Tracking of Spatial Configuration)
Visual Tracking of Spatial Configuration Software was developed by Christian Babski from fabric | ch for Workshop#4. It is a server/client based tracking software where you can add any number of tracking camera and computers (4 camera per computer).
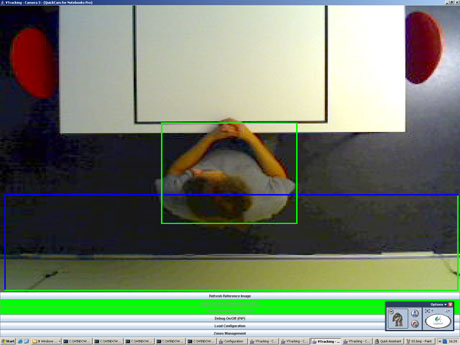
The principle is that you can draw any number of "zones" in any camera view and that these zones can then be occupied (by a user, an object, etc.) or not (on/off status). Combining 2 camera that look at the same part of space from different points of view (top and side for example) let you know if this part of space is occupied of course, but also if a person is standing or sitting in the zone for example. The server centralises the on/off status of the different camera's zones, match it to a configuration file (i.e. this zone + this zone "on" equal "a user is sitting on this chair") and passes this information to other applications (in our case the robots, tanks to bluetooth communication).
-
You can follow the development of the architectural software in this blog:
_ VTSC - Tech. Review
_ Exemple d'utilisation du Tracking Vidéo (VTSC)
_ Video Tracking System of Spatial Configurations
_ VTSC System - Testing
_ VTSC in use
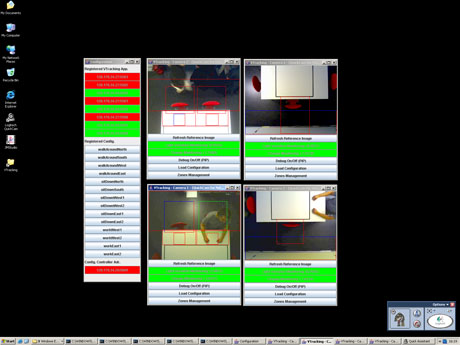
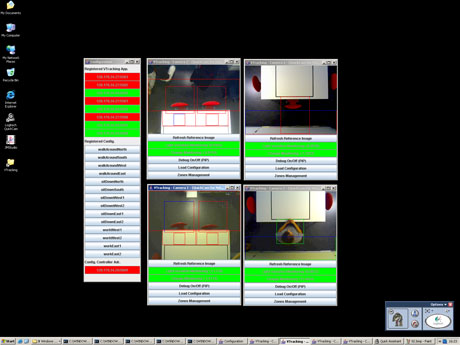
Below, a couple of VTSC's screenshots. Camera views are from the four ceiling camera. Zone in red = "off", green = "on"...

Posted by patrick keller at 3. 03. 2007 14:07